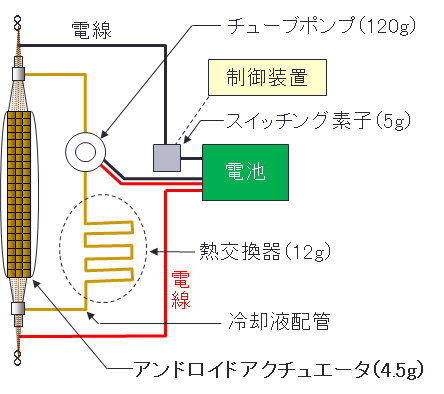
【簡略図】
【背景】
昨今、ロボットやパワーアシストスーツ等に用いる人工筋肉として、電動モータ・空気圧アクチュエータが用いられております。
電動モータは、直接通電駆動が可能で応答性が高くパワー効率が高いためロボット用アクチュエータの主流となっております。しかし、重量当たりの発生力が小さく、必要トルクを得るため減速機を組み込んでギアドモータにする必要があるため騒音の問題があり、鉄や銅でできたケーシング・歯車・鉄心・巻線・磁石等の重く硬い部品で構成されているため、柔軟性と小型・軽量性に劣る問題がありました。
電動モータのこれらの問題を解決するため、近年空気圧アクチュエータが注目され空気圧ゴム人工筋肉の開発が進んでいます。空気圧ゴム人工筋肉は、発生力が大きく軽量で柔軟な特長を持っています。しかし、空気を使用するため応答性が低く制御が困難で、空気圧縮機(エアコンプレッサー)や電磁弁が必要なため、システム全体を小型化しにくくモバイル性が低く、騒音が大きい問題がありました。
これらに対し、形状記憶合金(SMA)アクチュエータは、SMAのワイヤーやコイルばねを通電加熱することで形状記憶効果を発現させ、アクチュエータとして使用するものであります。このため、直接通電駆動が可能で静粛性が高く小型・軽量化が容易であり、素材自身が柔らかいので柔軟性が高い特長を持っております。反面、加熱後放冷を待つ必要があるため応答性に問題があり、熱容量の小さい細いワイヤーを単独で使用するマイクロマシンを初めとする発生力が小さくても問題のない小型機器での使用に限られていました。以下に、これらアクチュエータを比較した表を示します。
| 項目 | アンドロイド アクチュエータ | 従来型SMA アクチュエータ | 空気圧人工筋肉 | 電動モータ |
| 発生力 | ◎ | △ | ◎ | △ |
| 発生変位 | ○ | × | ○ | ○ |
| 応答性 | ○ | × | △ | ◎ |
| パワー効率 | △ | △ | ○ | ◎ |
| 柔軟性 | ◎ | ◎ | ◎ | × |
| 静粛性 | ◎ | ◎ | × | △ |
| 小型軽量性 | ◎ | ◎ | ○ | × |
| モバイル性 | ○ | ○ | × | ◎ |
※アンドロイドアクチュエータは、金子コード株式会社の登録出願中の商標です。
Androidactuator(商標登録出願中:商願2017-76430)
SMAアクチュエータを人間並みの大きさの機器に使用するには、SMAワイヤーを太くするか細いワイヤーを多数束ねることで大きな発生力が得られます。しかしワイヤーを太くした場合、熱容量が大きくなり加熱・冷却時間が長くなって応答性が悪化し、消費電力が大きくなる問題が生じます。一方、細いワイヤーを多数束ね合わせると、ワイヤー間に熱が溜まって放冷効率がさらに悪化する問題が生じます。
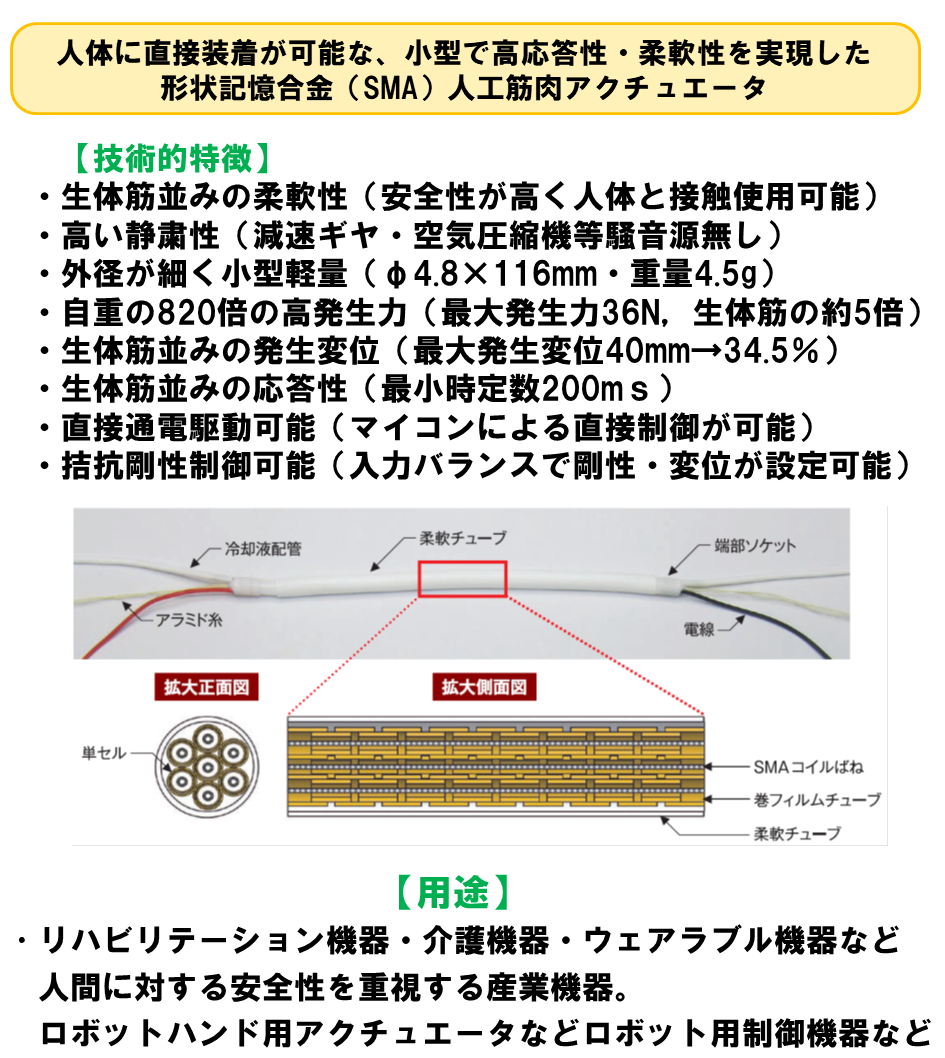
本システムの人工筋肉では、まず、特殊なSMAコイルばねを特殊な形状・材質のフィルムチューブ内に収め、これを束ねた単セルを構成します。そして、これを柔軟チューブに収めて冷却液を流すことにより、応答性・柔軟性を改善するとともに従来の形状記憶合金(SMA)アクチュエータの問題を解消し、人体サイズでの応用を可能にしました。
この結果、システム全体としての小型化を実現するとともに、柔軟で人体に直接装着可能で発生力と応答性に優れた人工筋肉が実現できました。
本システムの人工筋肉は、生体筋に匹敵する柔軟性、静粛性、小型・軽量性、変位量、応答性を有します。また、生体筋の約5倍の発生力があり、直接通電駆動が可能で、拮抗剛性制御が可能です。このため、リハビリテーションロボットや人体装着型パワーアシスト等、人間に直接接触する機会の多い機械システムに適したアクチュエータとして活用可能です。また、エアコンプレッサー等を使用しないため、騒音もほとんどありません。さらに、電源は電池、冷却系はコンパクトな閉鎖系であることから、工場・倉庫や屋外でも利用可能で、携帯して使用するシステムにも適用できます。本技術を用いた応用製品の開発や事業展開に意欲がある企業を歓迎いたします。
【技術内容】
本人工筋肉の収縮メカニズムは、SMAワイヤーと同様ですが、SMAワイヤーは発生変位が約5%と小さいためコイル化により約50%に拡大して用いています。また、SMAコイルばねを長方形断面素線コイルばねとしています。
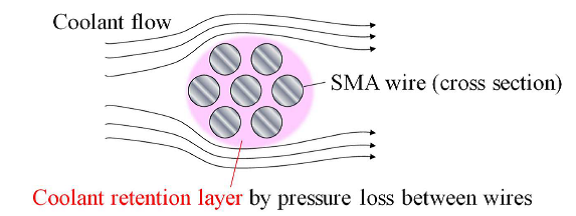
本人工筋肉ではSMAコイルばねを複数本束ねて用いていますが、このように複数本を束ねる構成を取った場合、冷却液を流してもSMA間に圧損で冷却液が滞留し冷却効率が落ちたり冷却が不均一になったりする問題がありました(次図のピンク色部分が冷却液の滞留層です)。
そこで、次図(上)に示す特殊形状のポリイミドフィルムを巻いて、次図(下)の構造のチューブ状被覆材としました。
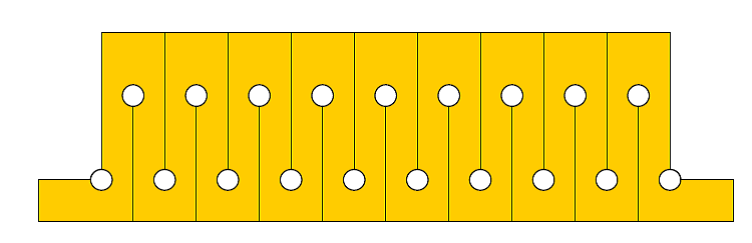

このポリイミドの特殊チューブ内にSMAコイルばねを収め、これを束ねて柔軟チューブ(天然ゴムチューブ)に収め、冷却液を流すことにより、冷却液の滞留や不均一な冷却の問題を解消し、高い応答性を実現しました。
また、このユニット化により生体筋肉と同様の構成が実現できます。
【技術・ノウハウの強み(新規性、優位性、有用性)】
本人工筋肉の利点は以下の通りです。
・生体筋並みの柔軟性(安全性が高く人体と接触使用可能)
・高い静粛性(減速ギヤ・空気圧縮機等騒音源無し)
・外径が細く小型軽量(φ4.8×116mm・重量4.5g)
・自重の820倍の高発生力(最大発生力36N,生体筋の約5倍)
・生体筋並みの発生変位(最大発生変位40mm→34.5%)
・生体筋並みの応答性(最小時定数200ms)
・直接通電駆動可能(マイコンによる直接制御が可能)
・拮抗剛性制御可能(入力バランスで剛性・変位が設定可能)
【連携企業のイメージ】
例えば下記の企業と連携可能です。
1)リハビリテーション機器・介護機器・ウェアラブル機器など
人間に対する安全性を重視する産業機器の開発・販売を行っている企業
2)義肢・医療用ロボットの開発・販売を行っている企業
3)介護サービス、運送業・倉庫業、健康事業・スポーツ産業(ジム)など
パワーアシストやパワーレジストを利用できる事業を行っている企業
4)アクチュエータ・ロボットハンド・マニピュレータなどのロボット用制御機器の
開発・販売を行っている企業
5)産業用ロボットその他、本技術の製品化・活用に意欲がある企業。
【技術・ノウハウの活用シーン(イメージ)】
軽くて柔らかい材料で人体に直接装着可能であると共に高い動力を発生できるため、人体への安全性が求められるリハビリ機器や人体装着用パワーアシスト機器に適しています。特に軽量・小型であることから、パワーアシスト機器を人体に装着したまま動き回る必要のある介護サービス、運送業・倉庫業での利用も考えられます。
義肢・医療用ロボットにも適用が期待されます。
また、パワーアシスト機器を人体に装着したまま屋外に出て行くことも可能なため、健康事業、ジムなどでの利用も考えられます。この点では、逆に、運動に対する抵抗性を高めた人体装着用パワーレジスト機器としても利用できる点も特徴です。すなわち、負荷を掛けて筋肉運動を行うことが可能なため、ベンチプレス等、従来の器具では危険があった運動を安全に行うことも可能になります。
本人工筋肉の応用例は下記の通りです。設計の工夫次第で様々な用途に適用可能です。
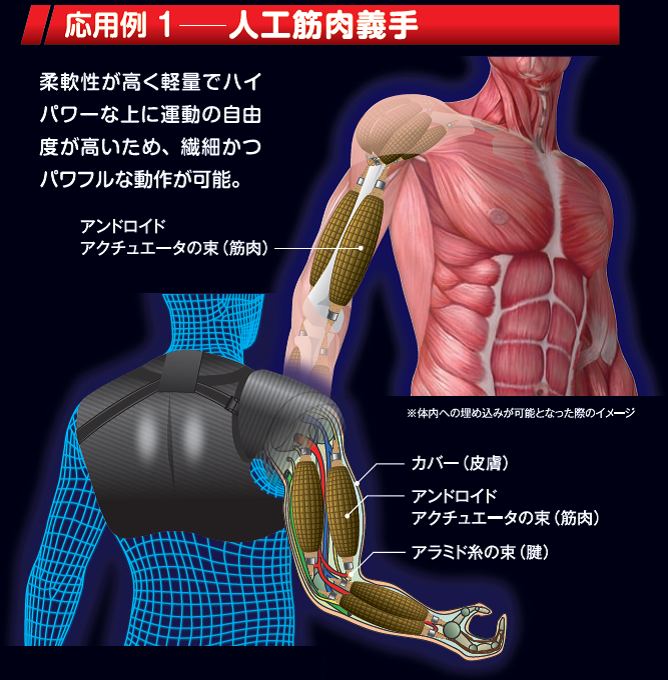
【応用例1:人工筋肉義手】
従来の義手は、機械的なものが主流であり、複雑な動きを実現しようとすると機器構成が複雑となり、軽量化が困難でした。
人工筋肉は軽量でも大きな出力密度が発揮でき、摺動部が無いためメンテナンスが容易、柔軟性があり、筋特性と同様の特性を持っているなどの特長があり、義手への応用が考えられます。しかし、空気圧ゴム型人工筋肉は、空気圧で駆動するためコンプレッサー音や送気音がうるさく、コンプレッサーを人体に常時装着したり、装着したまま移動したりするのに困難が伴いました。
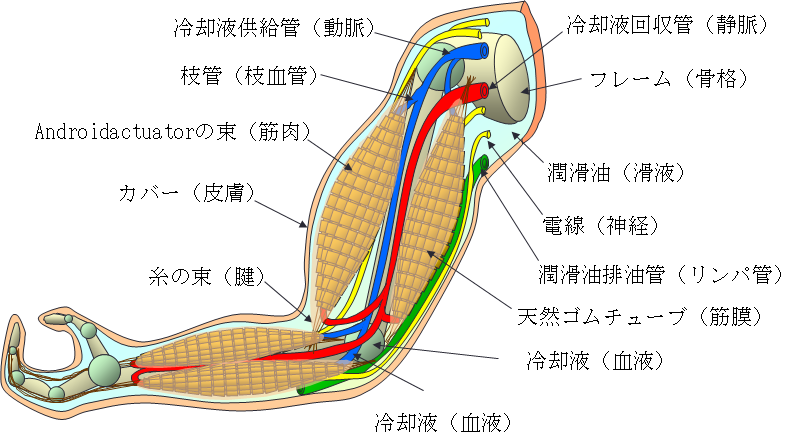
本システムの人工筋肉を使用すれば、下図に示すように、生体の手や腕と同様のシステムとして人工筋肉義手を構成できます。この人工筋肉義手は、筋肉部分が本人工筋肉アクチュエータで構成されているほか、筋膜相当部分は柔軟チューブ、血管相当部分を冷却液、神経相当部分を制御電線としており、生体の手や腕と対応した義手です。
この人工筋肉義手は他の義手に比べ、軽量、関節が柔軟、機構が生体類似でシンプル、駆動系に大きなスペースを要しないという利点があります。また、駆動制御が電気信号によるため、筋電義手としての適用にも親和性があります。
さらに小型化が容易であり(1ユニット:φ4.8×116mm、4.5g)、拮抗剛性制御が可能であることから、腕だけでなく手や指レベルでの繊細な動きにも対応可能です。
この人工筋肉義手は、生体筋と同様に軽量であり、人工筋肉としての収縮力も生体筋同等ですが、生体筋以上の最大発生力があるため、十分な筋力が実現できます。
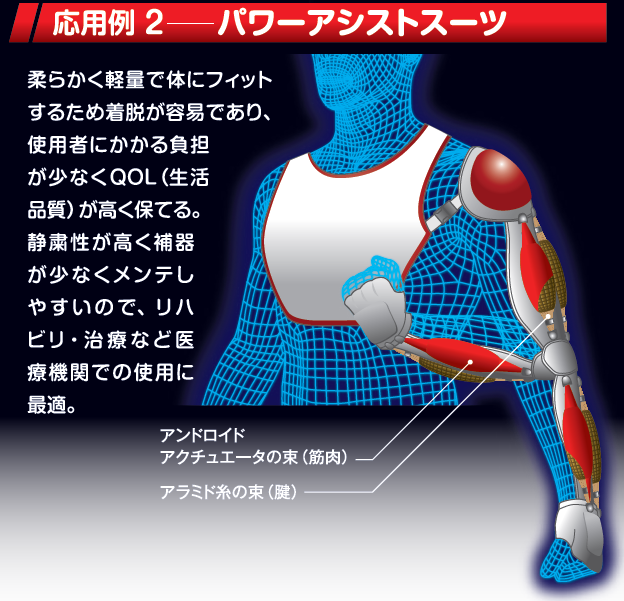
【応用例2:パワーアシストスーツ】
これは、本人工筋肉が生体筋と類似の性質を持つことを利用し、生体と同様の配置を行ってパワーアシストスーツとした例です。ポンプユニットを有し、冷却液を循環させて用います。冷却液としてはPFPE(パーフルオロポリエーテル)を使用しております。この液体は、耐熱性に優れるとともに不活性で室温での潤滑性にも優れており、循環させるだけで十分な冷却効果を発揮します。人体温での冷却も可能です。もちろん、使用条件によって他の冷却液を用いることもできます。関節等にセンサを取付けることで、インテリジェントでスマートなパワーアシストスーツが実現できます。また、ヒト以外の動物(ペット等)の障害のカバーにも利用が期待できます。
従来のパワーアシストスーツには、関節が硬く、重量が50kg以上と非常に重い欠点がありました。また、硬い構造のため人間が接触すると怪我をしてしまう恐れもありました。これに対し、本パワーアシストスーツは、関節が柔らかく非常に軽量なので安全で扱いやすく、人間の動作との協調活動に適していると言えます。
【技術・ノウハウの活用の流れ】
本技術の活用や製品開発に興味がある方はお気軽にお問合せください。
デモを交えてご紹介させていただきます。
【専門用語の解説】
【人工筋肉】
人工筋肉とは、外部から何らかの制御を受けて伸縮し、それにより仕事を行う柔軟性の高いアクチュエータの総称です。本技術の形状記憶合金(SMA)を用いたもののほか、空気圧ゴム型、電場を掛けると収縮・伸張する圧電素子、イオン濃度差により変形するゲル、光により膨潤・収縮する高分子等があります。
【形状記憶合金(Shape Memory Alloy, SMA)】
形状記憶合金は、一定温度(変態点)以下で外力を加えて変形しても、変態点以上に加熱すると、変形前の形状に復帰する性質を持った合金です。身近な応用としてはブラジャーのカップのワイヤーがあり、洗濯等で変形しても肌温度でもとの形状に復帰してその状態を維持します。
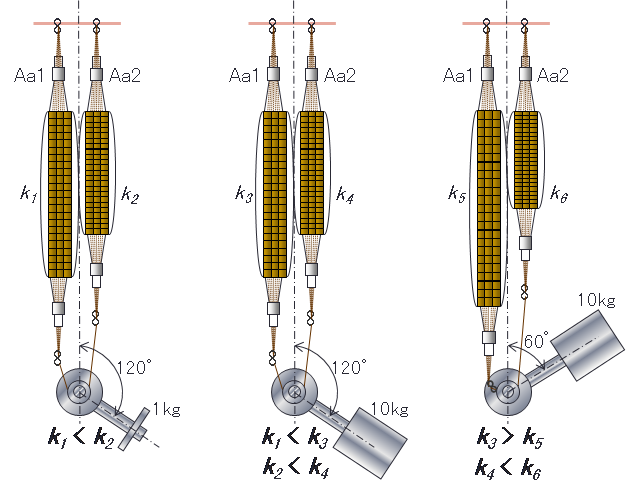
【拮抗剛性制御】
本人工筋肉は、投入する電力の大きさで縮もうとする性質すなわちバネ剛性を変えることができます。これを可変剛性と言います。そこで、下の図のように2本の人工筋肉の間にプーリ-を置いて拮抗状態に配置して左右の人工筋肉に加える電力のバランスを調整することで、剛性(k)のバランスを変えて拮抗する人工筋肉間に収縮量の差を生じさせることができます。この収縮量の差分をプーリにより回転運動に変換し、関節を駆動させることがでます。この方法により、異なる重さのものを同じ角度や高さに保持することが可能になり、同じ重さのものを違う角度や高さに保持することも可能になります。これが拮抗剛性制御です。生体筋は軸方向に収縮のみするため、通常拮抗配置を取ります。従って、拮抗剛性制御は生体でごく普通に使用される制御手法と言えます。生体の複雑で精密で力強い動作は、この制御手法により実現されているわけです。