【簡略図】
【背景】
ミミズは、その体を構成する多数の関節の伸縮を利用して、地上、地中、狭い隙間を移動します。この運動は、「蠕動運動(ぜんどううんどう)」と呼ばれ、多くの動物にみられる脚を使った移動方法に比べ、非常に単純な動作で移動を実現する運動方式です。
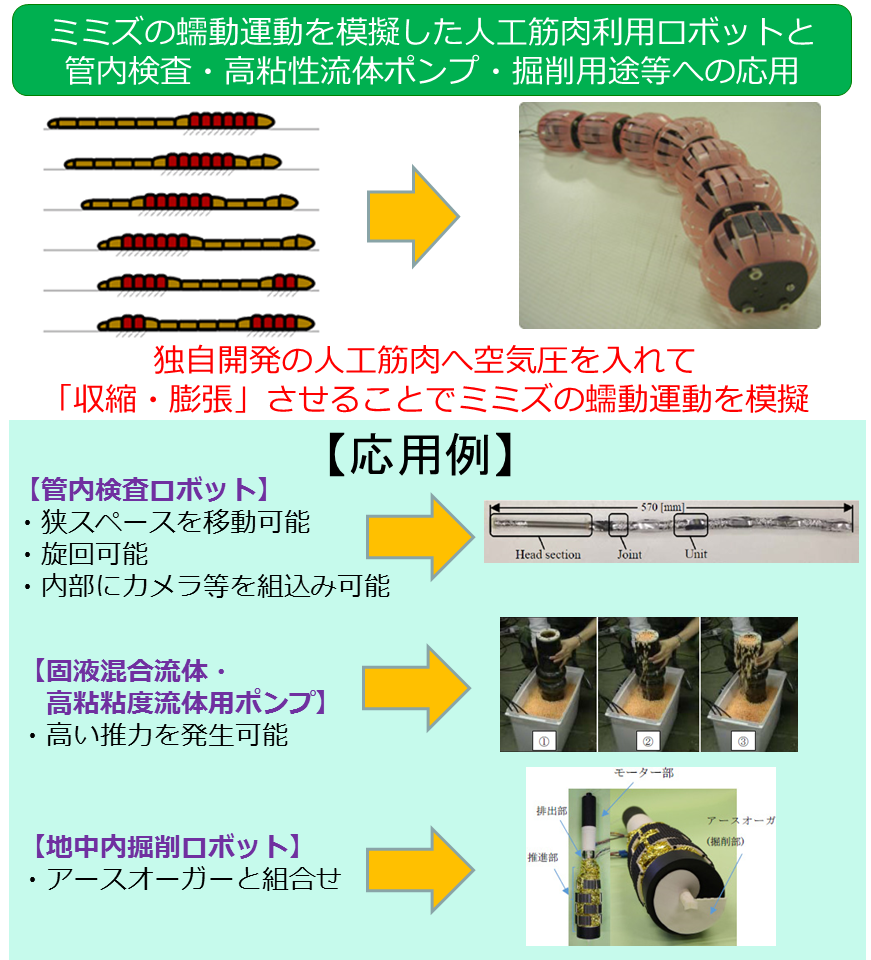
中村研究室では、ミミズの蠕動運動を模擬したロボットを研究開発しています。細い管内へ潜りこんでの検査や、高い推力を利用したポンプ等へ適用可能です。
本技術の製品化・活用に意欲がある企業を歓迎します。
【技術内容】
【ミミズの蠕動運動の特徴】
ミミズの体は約150の体節からなり、その1つ1つの体節を順に伸縮させる事で蠕動運動を行っています。蠕動運動とは人間の食道や腸にもみられる運動で、縦波の伸縮波を一定方向に進行させることによって、対象物を移動させることができる運動です。蠕動運動による移動は速度が遅く、一見効率の悪い運動に見えますが、移動に必要な空間が最も小さく、周辺環境に対して設置面積を大きく確保することができるなどメリットがあります。前進する際、ミミズはまず頭部の体節を収縮させ、順に後方の体節へとこの収縮を伝播します。この体節の収縮で地面との摩擦を発生させます。そして、収縮させた体節を伸長させる事で前進します。
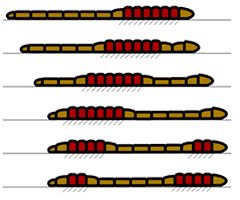
(ミミズの蠕動運動)
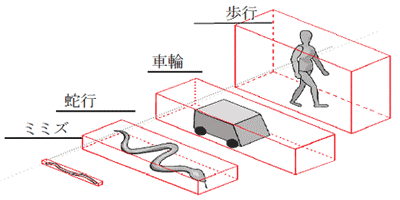
(移動に必要な空間)
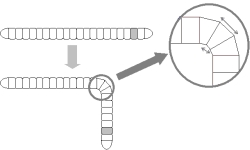
【蠕動運動での旋回】
ミミズが方向転換をする際には、いくつかの連続した体節の左右に伸縮の差を持たせることで頭部の進行方向を変えます。 さらに、ミミズには多数の体節があるため、残りの体節で蠕動運動を行い、移動することができます。
【ミミズ型ロボット】
ミミズの蠕動運動をロボット化したプロトタイプは下記のとおりです。

このロボットは、構成パーツに中村研究室で開発した人工筋肉を用いることで、柔軟性と高い伸縮性を実現しました。人工筋肉に空気圧を印加すると、「収縮・膨張」するため蠕動運動のユニットとして利用できます。
内部は空洞になっており、用途・場面に応じてカスタマイズすることが可能です。
例えば、下記のように内部に内視鏡を組込むことが可能です。

【技術・ノウハウの強み(新規性、優位性、有用性)】
・狭小空間を安定的・確実に移動することができます。
・内部を空洞にできるため、既存の検査装置や保守装具に取付け可能です。
・旋回して移動方向を変えることが可能です。そのため、曲管の多い場所でも移動可能です。
・高い推力を発生させることができます。そのためポンプや地中掘削としても活用可能です。
・独自開発の人工筋肉を用いることで柔軟性と高い伸縮性を実現しています。
【連携企業のイメージ】
例えば下記の企業と連携可能です。
1)管内検査機器の開発・販売を行っている企業。
2)動力用ポンプの開発・販売を行っている企業。
3)産業機器、ロボットの開発・販売を行っている企業。
4)他、本技術の製品化・活用に意欲がある企業。
※様々な応用可能性があります。お気軽にお問い合わせください。
【技術・ノウハウの活用シーン(イメージ)】
【細管内検査】
水道管やガス配管の細管としてよく用いられる25A管や15A管の検査には、工業用内視鏡を使用することが多いです。しかし、曲管が多い配管や15m以上の長距離下においては周囲の摩擦の影響で、なかなか先に推し進めることができなくなるため、内視鏡のみで検査することは困難です。
したがって、ロボットによる走行機能を備えた内視鏡が求められています。しかし、管が非常に小さいため、カメラ等を備えたうえで複数のエルボ管等を含めた細管の走行は非常に困難であり、現在のところそのようなロボットは存在しません。
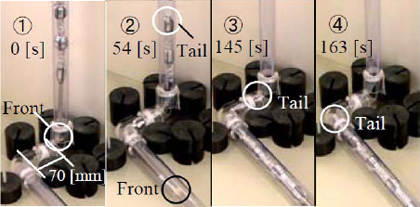
下記はミミズ型ロボットを細管用検査用途に適用したロボットです。

ロボットが連続エルボ通過している様子は下記の通りです。本ロボットは内部にカメラが搭載されており、15Aや25A等の細管において複数の連続したエルボを通過しつつ15m以上の長距離の管も検査することができます。
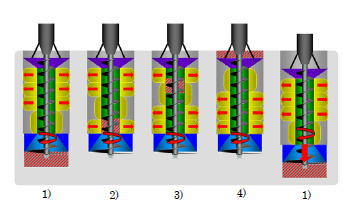
【固液混合流体や高粘度流体の搬送】
自然災害時における土砂の搬送や下水処理、工場における食品や汚泥の搬送など、様々な場面において固液混合流体や高粘粘度流体の搬送装置が必要とされています。
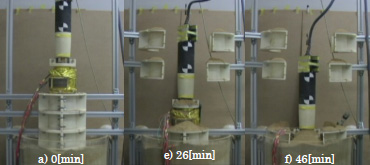
そこで、ミミズ型ロボットを腸管の蠕動運動を模擬するよう工夫しました。腸は固液混合流体や高粘度流体の搬送のみならず、固体と液体の混合・分離作業など様々な機能を有しています。腸の蠕動運動による搬送を実現することで、様々な流体を垂直搬送することに成功しました。下記は固体含有率30%のときの固液体混合流体を垂直搬送している様子です。固液体の混合・分離や汚泥や食品、セメント等の搬送に応用することが期待できます。

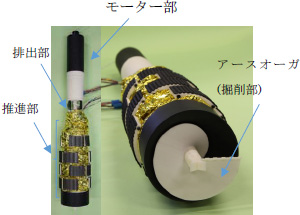
【掘削ロボット】
掘削用ロボットとして応用可能性があります。小さな穴を安定的に進むことができるミミズの蠕動型ロボットを推進機構に、土砂の掘削・運搬を単一の機構で行い容易に土砂を掘削できるアースオーガを掘削機構として用い、 2つの機構を併用することによって構成されます。
【技術・ノウハウの活用の流れ】
本技術の活用や製品開発に興味がある方はお気軽にお問合せください。
デモを交えてご紹介させていただきます。
【専門用語の解説】
【蠕動運動】
動物の消化管の運動、蠕形動物の移動運動などのように筋肉の収縮波を伴ううごめくような運動です。ヒトの消化管壁では外側の縦走筋と内側の環状筋、ミミズなどの体壁では外側の環状筋と内側の縦走筋、それぞれ二層の筋肉があり交互に伝播性の収縮をします。これらの収縮は体液や消化管内容物の静水圧を介して拮抗的に働き、一部がくびれて長くなったり、太く短くなったりします。
【アースオーガー】
動力を使用しモーターを回すことで接続したスクリュー等を回転させて地中にねじ込んで穴を掘っていく機械です。1人で作業できる小型のものから大型クレーンでつり下げて自重を使って掘り下げるものまで様々な種類があります。